Last summer, I had the opportunity to join Kalysta Actuation, a Deeptech startup based in Evry, France. Born as a spin-off (SATT) from Paris-Saclay University, the company specializes in high-performance electro-hydraulic actuators. This internship marked the end of my first year of specialization in Mechatronics.
The mission ? Upgrade the head of an existing humanoid robot.
This wasn’t just a typical student assignment. Working daily alongside the CTO and a team of PhD researchers, I was immediately thrust into the realities of industrial R&D: drastic space constraints, mass optimization, and the necessity to justify every design choice through rigorous preliminary study. Being immersed in such a high-level technical environment so early in my studies was an incredibly rich learning experience.
Phase 1: The State of the Art (Don’t Reinvent the Wheel)
Before even opening CAD software, my first task was to conduct a comprehensive State of the Art (SOTA) review on mouth mechanisms for humanoid robots. In R&D, you don’t design blindly; you analyze what exists to identify the solution best suited to the project’s specific needs.
I categorized existing solutions into three main families:
- Rigid Mechanisms (1 DOF): Simple, robust, actuated by a single motor (e.g., InMoov).
- Hybrid Mechanisms (Rigid + Silicone): More expressive, but mechanically complex.
- Cable Systems + Silicone Skin: Highly realistic (used for precise lip-sync), but require numerous actuators and are very bulky.
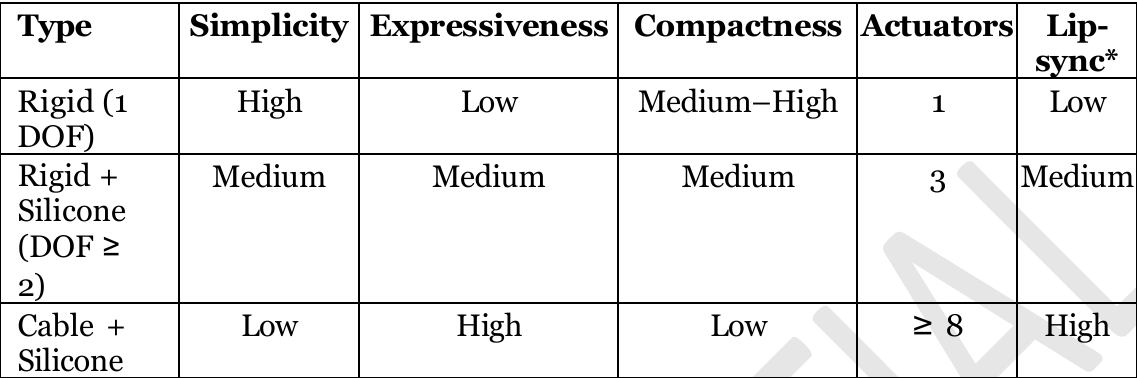
The Verdict: The goal of Kalysta’s robot was to demonstrate the raw power of their actuators, not to perform emotional social interaction. The dominant constraints were weight and footprint. Consequently, I steered the choice toward a compact rigid mechanical solution, freeing up critical volume for electronics while ensuring structural robustness.
Phase 2: Complex Design & Modeling (CATIA)
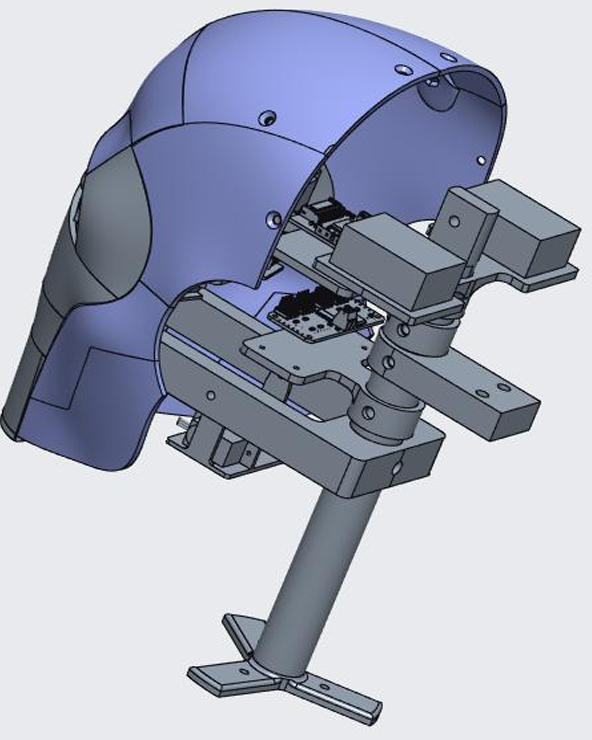
This is where the “real” design work began. The robot’s previous skull was derived from a 3D scan of a human head. While visually realistic, it was a mechanical integration nightmare: no flat surfaces for mounting PCBs, irregular internal volumes, and impossible maintenance.
My role was to design a new skull “from scratch” that respected a humanoid aesthetic while acting as a functional technical chassis.
The Challenge of Organic Surfaces
I worked with CATIA (specifically the Generative Shape Design and FreeStyle modules). For someone used to classical parametric design (simple geometric shapes), shifting to surface modeling was a significant technical challenge.
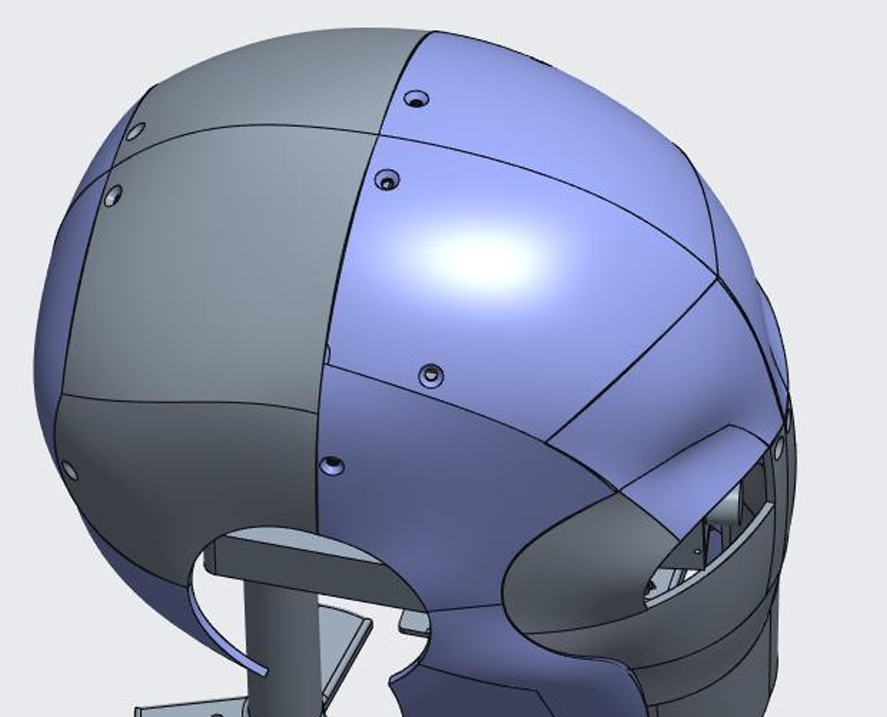
I had to manage:
- NURBS and surface continuity (C0, C1, C2) to avoid topological errors that would otherwise prevent the software from generating a closed, valid volume.
- The segmentation of the skull into multiple parts to facilitate printing and assembly.
- The integration of threaded inserts to make the entire structure modular and disassemblable.


Key Takeaway: The Reality of Mechatronics
Beyond improving my skills in CATIA, this internship taught me a fundamental lesson about my future profession.
To design this skull, I had to work in constant interaction with the electronics team. Every millimeter saved on the mechanics allowed for better motor driver placement or reduced cable length. I also had to precisely calculate the center of mass to avoid unbalancing the neck motors.
This is the “Mechatronic Trinity”: Mechanics impose constraints on electronics, which dictates software logic, and vice versa.
Collaborating closely with the CTO and PhD students at this stage of my education gave me a rare insight into these interdependencies. Even though I know now that I don’t want to do only pure mechanical design in the future, this experience was invaluable. Today, when I code or design a PCB, I have a much deeper understanding of the physical constraints that will surround my system.
Read the Full Report
For more details, you can refer to the full report.